Principles Of Measurement Used By Laser Sensors And Scanners
METHODS INCLUDE TRIANGULATION AND TIME-OF-FLIGHT
The method used to measure distance depends on the accuracy and distance capability required of the device. Measurement principles include triangulation, time-of-flight measurement, pulse-type time-of-flight systems, and modulated beam systems.
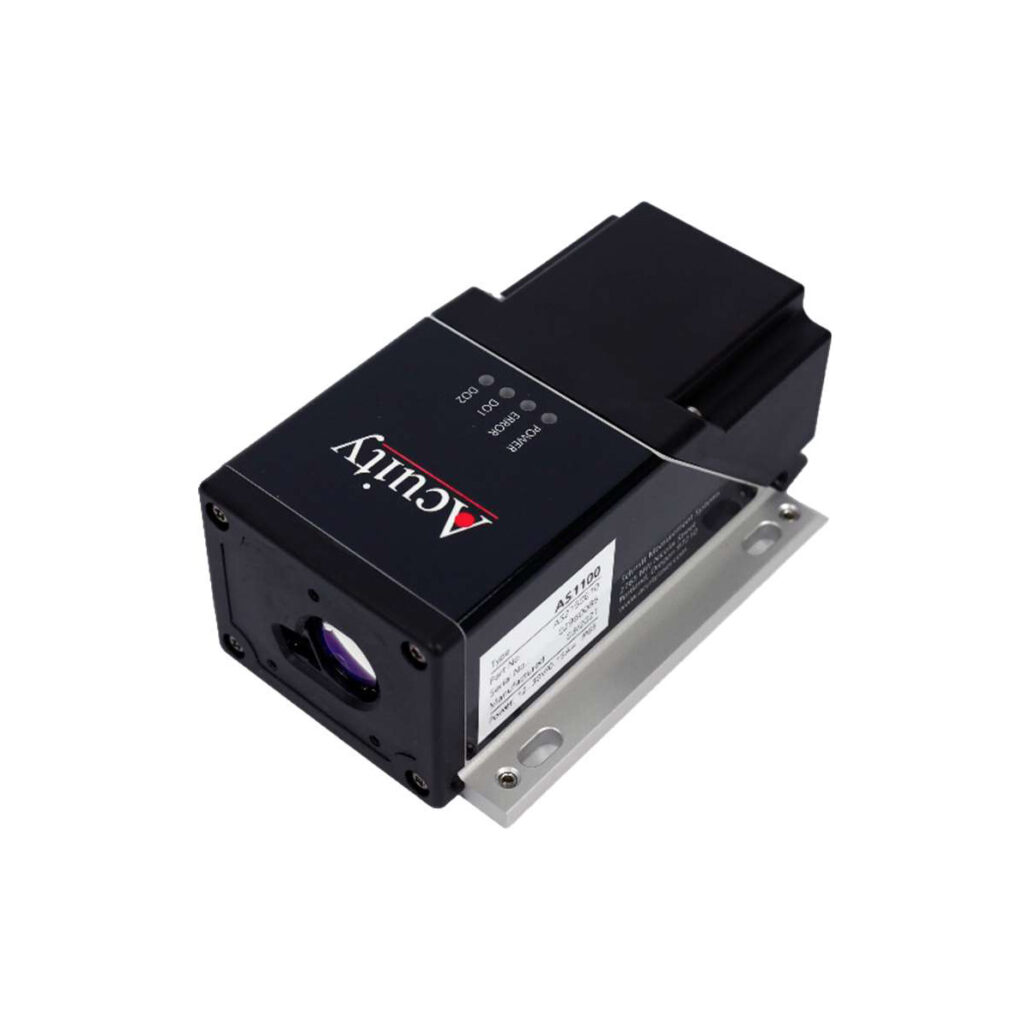
For distances of a few inches with high accuracy requirements, “triangulation” sensors measure the location of the spot within the field of view of the detecting element. Time of flight sensors derive range from the time it takes light to travel from the sensor to the target and return. For very long range distance measurements (up to many miles) “time-of-flight” laser rangefinders using pulsed laser beams are used. Modulated Beam Systems use the time light takes to travel to the target and back, but the time for a single round-trip is not measured directly. Instead, the strength of the laser is rapidly varied to produce a signal that changes over time.
laser triangulation sensor and the TRIANGULATION MEASUREMENT PRINCIPLE
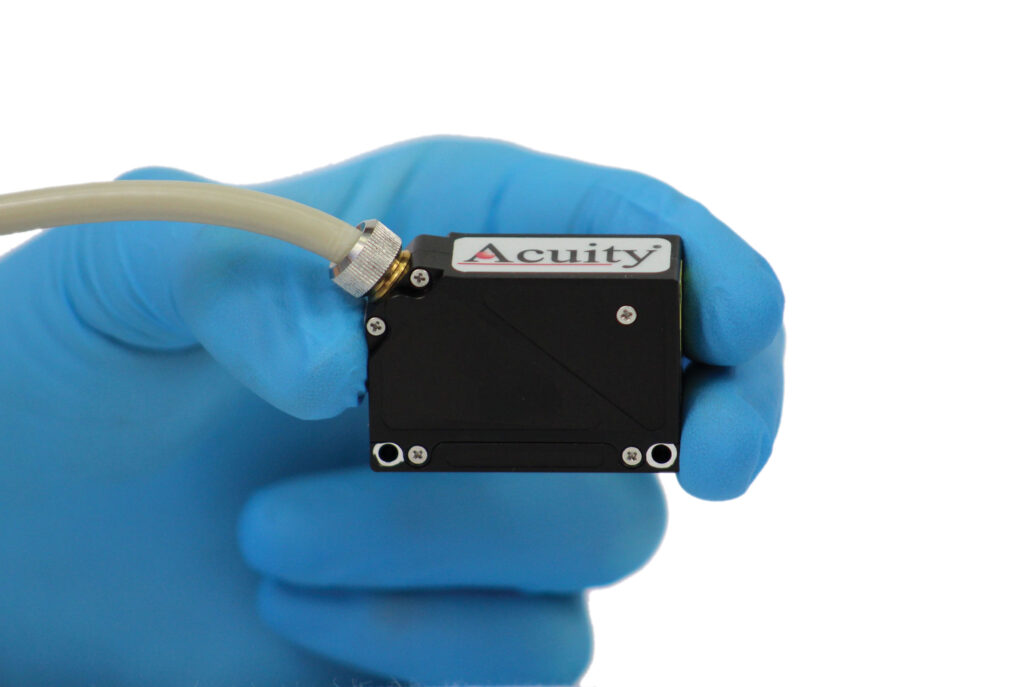
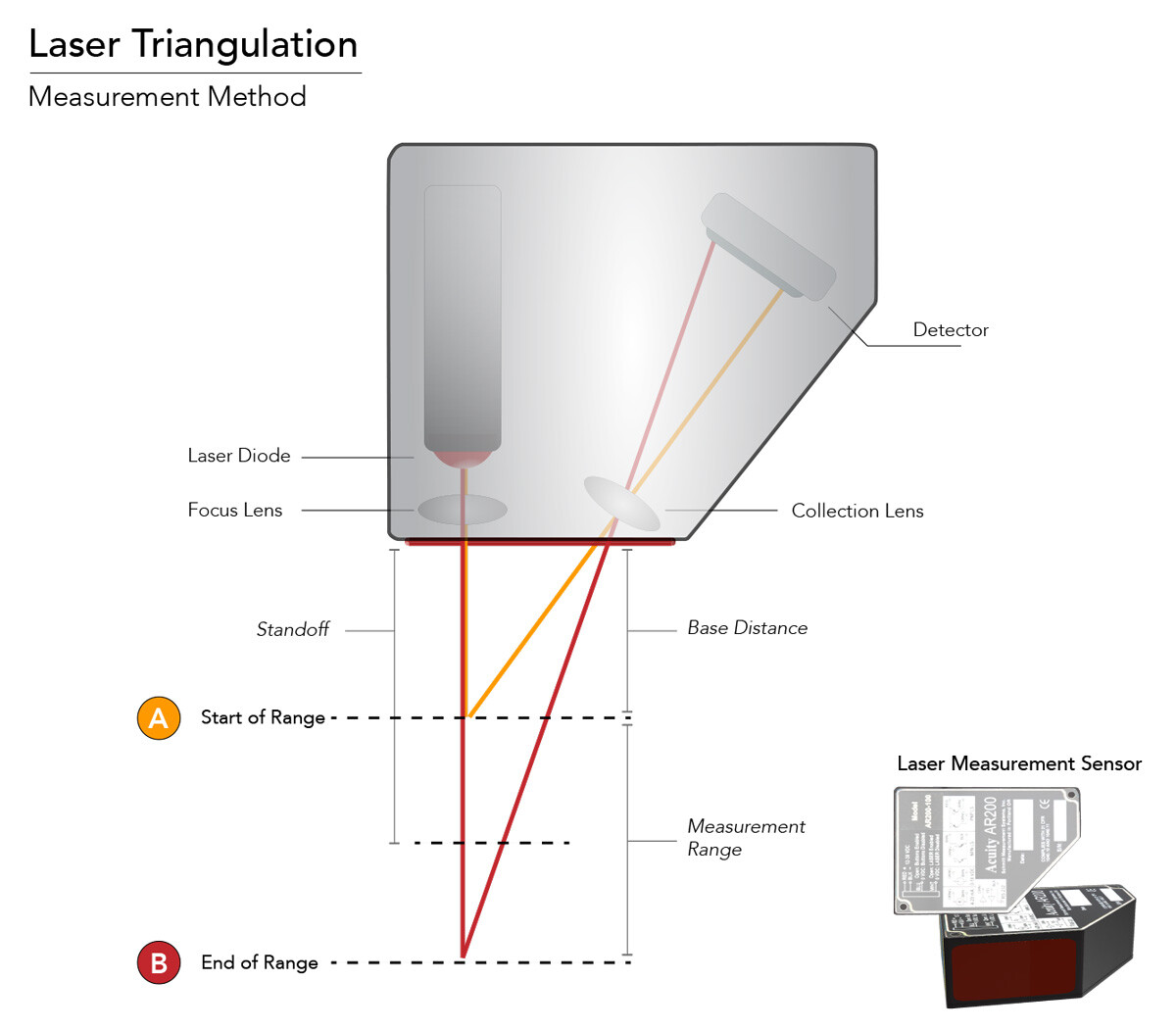 One method for accurately measuring the distance to targets is through the use of a laser triangulation sensor. They are so named because the sensor enclosure, the emitted laser and the reflected laser light form a triangle.
One method for accurately measuring the distance to targets is through the use of a laser triangulation sensor. They are so named because the sensor enclosure, the emitted laser and the reflected laser light form a triangle.
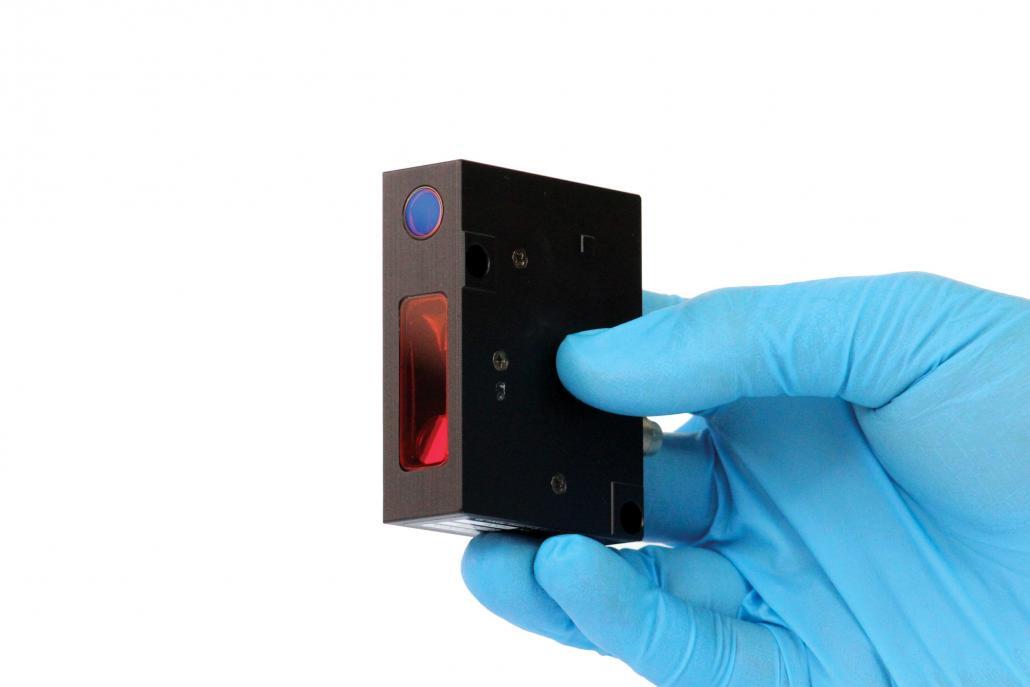
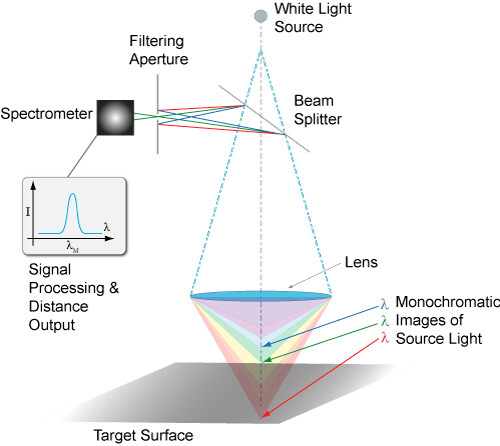
The laser beam is projected from the instrument and is reflected from a target surface to a collection lens. This lens is typically located adjacent to the laser emitter. The lens focuses an image of the spot on a linear array camera (CMOS array). The camera views the measurement range from an angle that varies from 45 to 65 degrees at the center of the measurement range, depending on the particular model. The position of the spot image on the pixels of the camera is then processed to determine the distance to the target. The camera integrates the light falling on it, so longer exposure times allow greater sensitivity to weak reflections. The beam is viewed from one side so that the apparent location of the spot changes with the distance to the target.
One of our triangulation displacement sensors is patented and much can be learned by reading the patent (USPTO 6,624,899).
Triangulation devices are ideal for measuring distances of a few inches with high accuracy. Triangulation devices may be built on any scale, but the accuracy falls off rapidly with increasing range. The depth of field (minimum to maximum measurable distance) is typically limited, as triangulation sensors can not measure relative to their baseline, the distance between the emitter and the detector.
The exposure and laser power level are typically controlled to optimize the accuracy of the measurements for the signal strength and environmental light level measured. The range data may be internally averaged over multiple exposures prior to transmitting if the sample rate is set appropriately.
For more please view our in-depth page on Laser Triangulation Sensors and for more fundamentals, you can learn more about triangulation at FierceElectronics.com.